Intitulé du produit |
Traqueur solaire |
|
- Résumé - Le projet consiste à réaliser un traqueur solaire autonome, le système réalisé est capable de suivre fidèlement la position du soleil avec une grande précision (rendement très élevé). Ce système permet d’assurer une production électrique maximum tout en minimisant le coût.
|
|
| Lire plus sur Projet01 | |
Intitulé du produit |
Machine a commande numérique CNC |
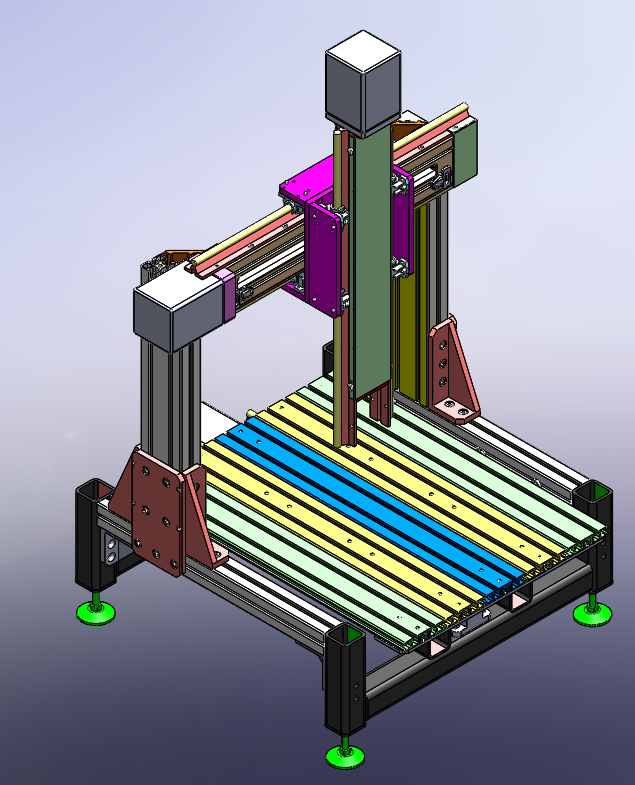 |
- Résumé - Le but de ce projet est de modifier et créer une machine à commande numérique sert au fraisage tout en utilisant les moyens disponibles au niveau de la plateforme technologique (PFT) au sein de l’USTO. Cette machine devant être robuste, fiable et simple de fonctionnement en vue d’une utilisation par les promotions futures de l’université lors de leurs thèmes de conception mécanique, par exemple. |
| Lire plus sur | |
Intitulé du produit |
Robot mobil pédagogique |
 |
- Résumé - Notre projet de fin d’étude est de concevoir un robot mobil à but pédagogique. Notre motivation principale fut l’idée de proposer une plateforme optimale et finie aux étudiant de l’USTO, cette maquette pourra leur permettre d’étudier plusieurs aspect divers et variée tel que la mécanique, l’informatique, la physique, l’automatisation l’identification etc… Nous avons essayé de garder à l’esprit certains critères que nous jugeons primordiaux comme : - L’aspect - L’espace - La sécurité - Les fonctionnalités |
| Lire plus sur | |
Intitulé du produit |
Maquette didactique d’un système birotor |
 |
- Résumé - Le projet consiste à réaliser une maquette pédagogique qui représente un système à double rotor sur laquelle différentes lois de commande peuvent être testées et développées. La maquette peut être configurée en deux structures différentes : une structure d’hélicoptère à rotor principal et à rotor de queue et une structure d’hélicoptère à deux rotors en tandem. La première version de ce prototype fut réalisée en 2017, ou nous avons constaté qu’une partie de l’instrumentation doit être remplacée. En effet, cette nouvelle version a subi des modifications, à savoir la partie mécanique, et la partie instrumentation. Nous l’avons doté par des encodeurs, pour avoir une mesure de position fiable, et de deux nouveaux moteurs qui développent une grande poussée. |
| Lire plus sur | |
Intitulé du produit |
Imprimante 3D |
 |
- Résumé - Rendre l'impression 3D accessible, réalisable, robuste, précis, et à un prix abordable, suivant un cahier de charge bien déterminé pour le service. |
| Lire plus sur | |
Intitulé du produit |
Robot Aspirateur V-RA |
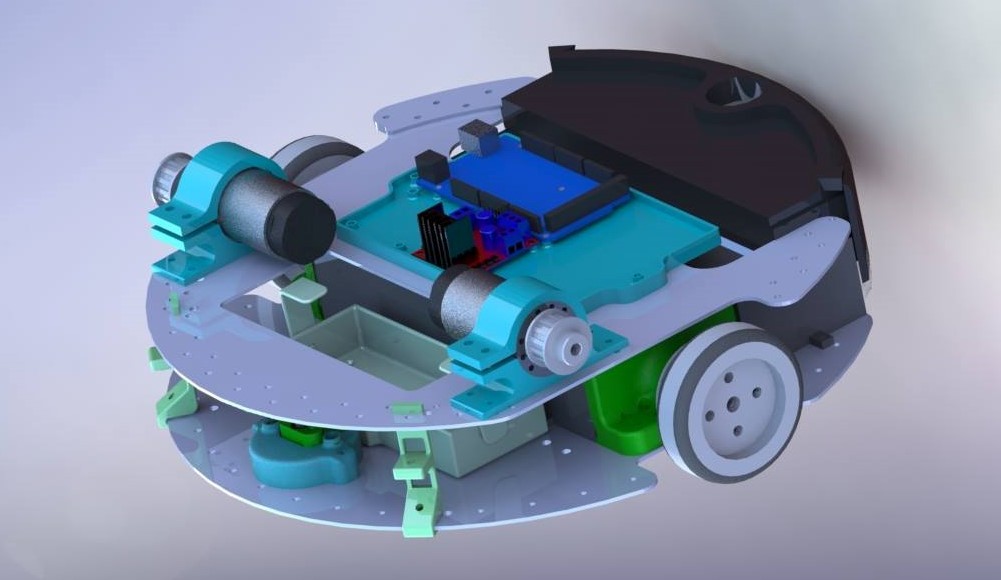 |
- Résumé - Le but du projet est de concevoir et réaliser un robot aspirateur autonome capable de se déplacer en toute liberté en évitant les obstacles et en assurant la tache de nettoyage. Le déplacement du robot est assuré par deux roues motrices et une roue libre, tandis que le nettoyage se fait grâce à deux brosses rotatives et un aspirateur. |
| Lire plus sur | |
Intitulé du produit |
Quadrirotor pour l’application de vue aérienne |
 |
- Résumé - Ce projet traite la modélisation, la conception et la réalisation d’un drone quadrirotor. Le projet introduit un modèle mathématique pour la simulation et la synthèse des lois de commande. Basé sur le modèle, diverses techniques de commande ont été utilisées pour concevoir différents contrôleurs. Le modèle dynamique et la simulation ont évolué d’un simple ensemble d’équations des lois de physique du mouvement, valide en vol selon tous les axes. Le drone quadrirotor a été réalisé sur la base de quatre moteurs électriques, fixés sur l’extrémité de quatre tubes en fibre de carbone, équipé d’une caméra 5Mp et une centrale inertielle très précise (10 degrés de liberté GY-80). |
| Lire plus sur | |